Inicio >> Soporte >> Filtros FIR

Aplicaciones de Filtros FIR en sistemas de sistemas de sonido
La aplicación de los Filtros FIR en el campo de sonido en vivo se ha incrementado de manera exponencial, cada día es mas común ver que los sistemas de sonido incorporen este procesamiento, obteniendo ventajas considerables, tales como una respuesta con la menor distorsión de fase posible y mejor control directivo. A continuación hablaremos sobre el uso de este tipo de filtros y cómo, su implementación mejora considerablemente el rendimiento y comportamiento del mismo.
Dentro del procesamiento digital de señales existen diversas técnicas de manipulación de la señal para lograr objetivos, ya sea para seccionar un rango de frecuencias (filtrado) o para obtener adicionalmente al filtrado, una respuesta grupal con el mismo tiempo (retraso grupal). En cuanto a la etapa de Filtros, podemos definirlos como filtros sencillos o complejos, los cuales dependiendo de la matemática aplicada en ellos, obtendremos un rango de frecuencias con una respuesta de fase modificada, como la resultante de utilizar filtros de tipo IIR (Infinite Impulse Response), o bien logrando un filtrado más puro y provechoso, con las ventajas de obtener una respuesta sin distorsión de fase como el caso de utilizar filtros de tipo FIR (Finite Impulse Response).
Tomemos en cuenta diversos aspectos previos a la etapa del procesamiento FIR. La señal que inyectamos directamente a un altavoz debe ser una señal previamente filtrada en la etapa de procesamiento, en la cual se define en base a las características del altavoz como rango de frecuencia útil, potencia, sensibilidad, de igual manera debemos analizar si el altavoz fue desarrollado por el fabricante para trabajar con cierta gama de frecuencias, por ejemplo Low (LF), Mid Bass (MB), Mid, Hi, etc.
Se toman en cuenta otros aspectos como el tipo de caja acústica empleada, por ejemplo, si se piensa en un subwoofer, cuyo recinto acústico es de tipo infinito (es decir que no cuenta con ductos de sintonía) y su aplicación es como complemento de bajas frecuencias , el altavoz seleccionado deberá tener las características para ello, por ejemplo un altavoz de 15” ó 18" cuya respuesta en frecuencia sea entre los 30 y los 80Hz. Los rangos de frecuencia y los tipos de filtro son empleados para protección del altavoz, así como los ajustes de nivel y limitación en la etapa de potencia, que involucrará una estructura de ganancia.
Si pensamos en un altavoz para rango completo a 2 vías, podemos optar por utilizar un altavoz coaxial que tenga un driver de alta frecuencia y su respectiva bocina incorporados en el mismo altavoz, que dependiendo del rango buscado, podemos optar por el uso de un componente de 12”, o bien, si buscamos que el rango de frecuencias sea aun mas bajo, podemos elegir un altavoz de 15” para que las frecuencias como 60Hz sean reproducidas por el mismo. Y mejor aún, desde un mismo eje por ser un altavoz de tipo coaxial.
Para los siguientes ejemplos seleccionamos un sistema a 2 vías, cuyos componentes incorporan un altavoz de 15” para el rango de frecuencias medias con extensión en baja frecuencia, utilizando un altavoz MB (Mid Bass) y un driver de compresión con garganta de 1.75” para la alta frecuencia.
En cuanto al recinto acústico emplearemos una caja de tipo “ vented" con 64 Litros cúbicos, sintonizada a 60Hz, y un difusor para la alta frecuencia con apertura horizontal de 90 grados y 45 grados en el eje vertical.
Una vez seleccionado el sistema, comenzaremos a aplicar sus respectivos filtros.
En este caso se muestra el procesamiento de un sistema a 2 vías (altavoz para el rango de MF + driver de compresión para el rango de HF)
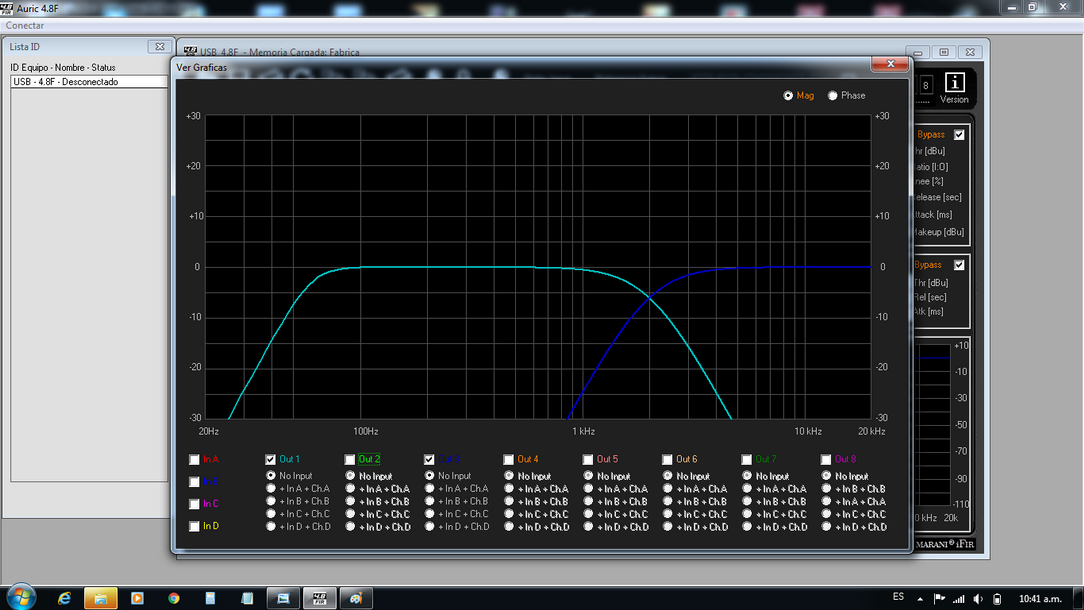
Imagen 1.
Respuesta del Crossover del sistema a 2 vías (Mid & Hi)
Gráfica verde acuamarina MF
Gráfica azul, HF
Ahora mostraremos el Crossover de cada una de las vías:

Imagen 2.
Crossover, vía de alta frecuencia (HF)
HPF en 2,000 Hz
Tipo de filtro Linkwitz-Relay, 4to orden (-24 dB por octava)
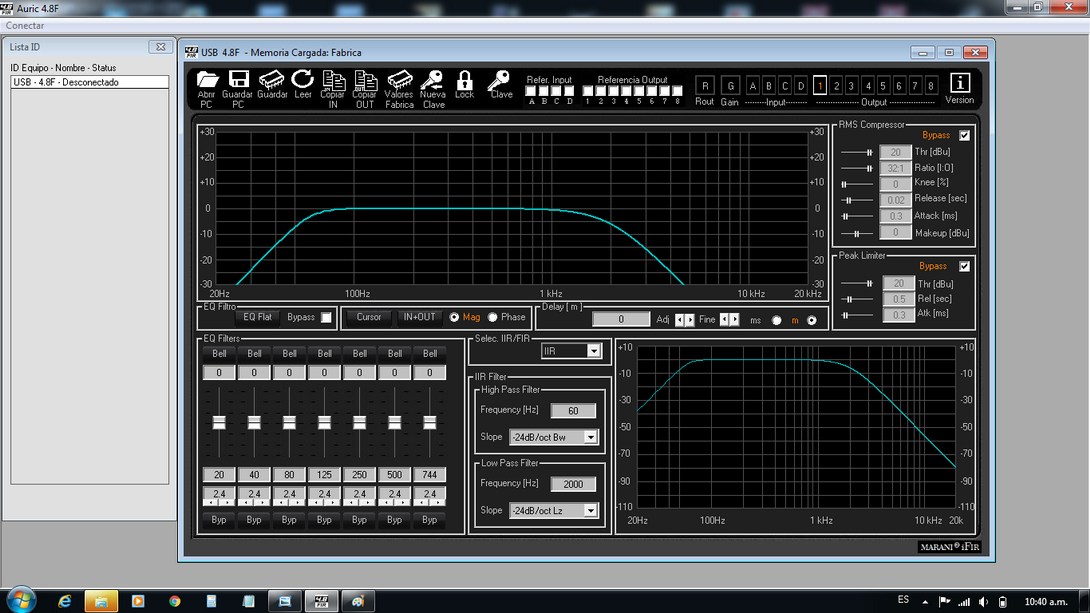
Imagen 3.
Crossover, vía de frecuencias medias (MF)
HPF en 60Hz
Tipo de filtro Butterworth de 4to orden
LPF en 2,000 Hz
Tipo de filtro Linkwitz-Relay, 4to orden (-24 dB por octava)
A continuación se muestra el resultado del comportamiento de fase después de aplicar los filtros mencionados.
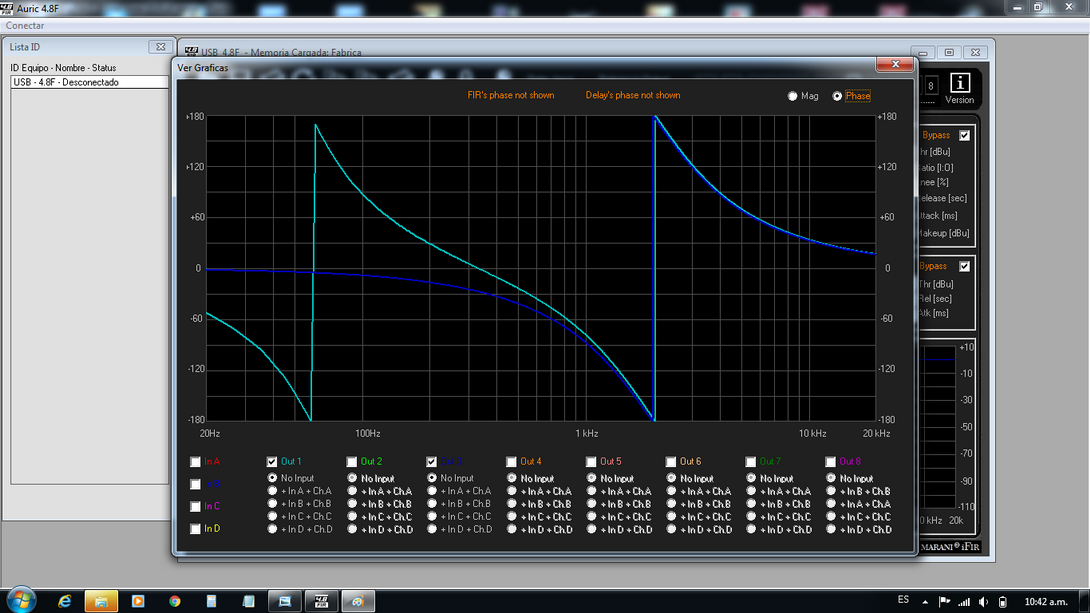
Imagen 4.
Gáfico de respuesta de fase sistema a 2 vías (etapa electrónica del procesador)
Gráfica verde acuamarina MF
Gráfica azul, HF
Cada vía, al ser procesada de manera independiente, tendrá un comportamiento diferente en su respuesta de fase, pues ésta sufre cambios por el simple hecho de haber aplicado filtros de tipo IIR.
Si analizamos el gráfico de derecha a izquierda, podemos ver la respuesta de fase de color azul (HF) que de manera ascendente se dirige hacia arriba y de la misma manera hacia la izquierda hasta topar en el borde superior, y continua de la parte inferior hacia la izquierda. La misma deformación de fase sucede con la vía de medios, solo en la zona o rango de frecuencias que éste reproducirá.
Este comportamiento en el gráfico indica que le ha tomado cierto tiempo el haber sido procesado, y por ende, la respuesta muestra este comportamiento. Debemos tomar en cuenta que este fenómeno ocurrirá, siempre y cuando se utilicen este tipo de filtros sin otra técnica adicional.
De manera utópica, si pudiéramos obtener una respuesta de fase perfecta, ésta sería una línea recta sobre el eje de cero grados, la cual mostraría el mismo tiempo en toda su gama de frecuencias. Es decir, sin distorsión de fase, tema el cual hablaremos más adelante.

Imagen 5
Se muestra la respuesta de fase de un sistema desde 20Hz a 20kHz sin procesamiento, cuyo resultado carece de distorsión de fase.
Ahora bien podemos emplear un sistema a 3 vías con altavoces independientes, como un altavoz de 15” para el rango de 60 a 300Hz, un altavoz de 8” para el rango de 300 a 4,000Hz y un driver de alta frecuencia para el rango de 4,000 a 20,000Hz.
El procesamiento de cada vía se muestra con gráficos de diferentes colores.
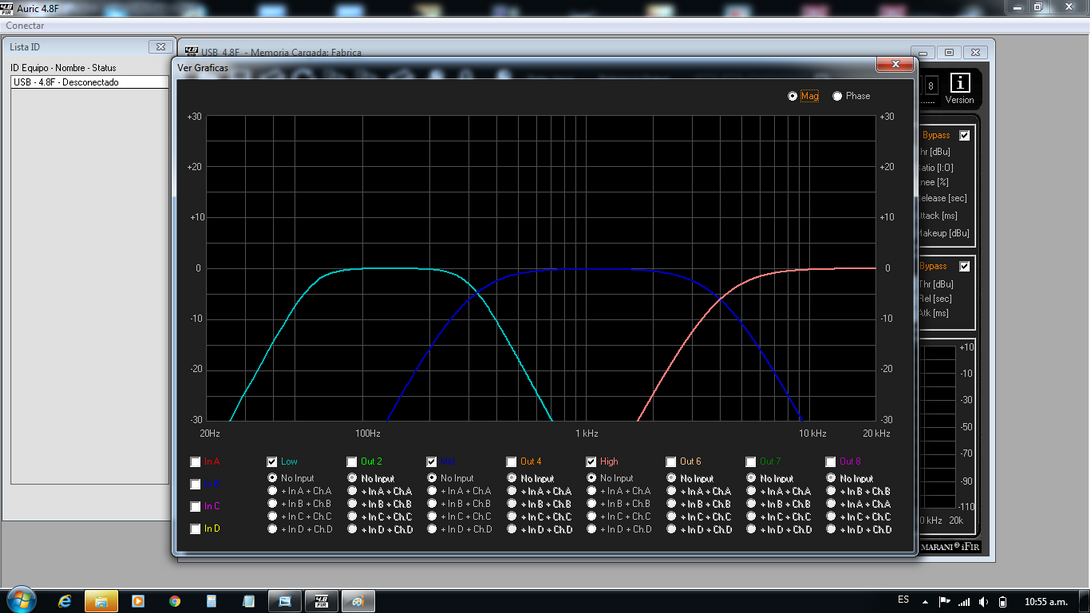
Imagen 6
Crossover
Sistema a 3 vías procesado de manera independiente
Gráfico de color verde LF HPF en 60Hz / LPF En 300Hz. Tipo de filtro Butterworth de 4to orden en ambos filtros
Gráfico de color azul MF HPF en 300Hz / LPF En 4,000Hz. Tipo de filtro Butterworth de 4to orden en ambos filtros
Gráfico de color naranja HF HPF en 4,000Hz Tipo de filtro Butterworth de 4to orden
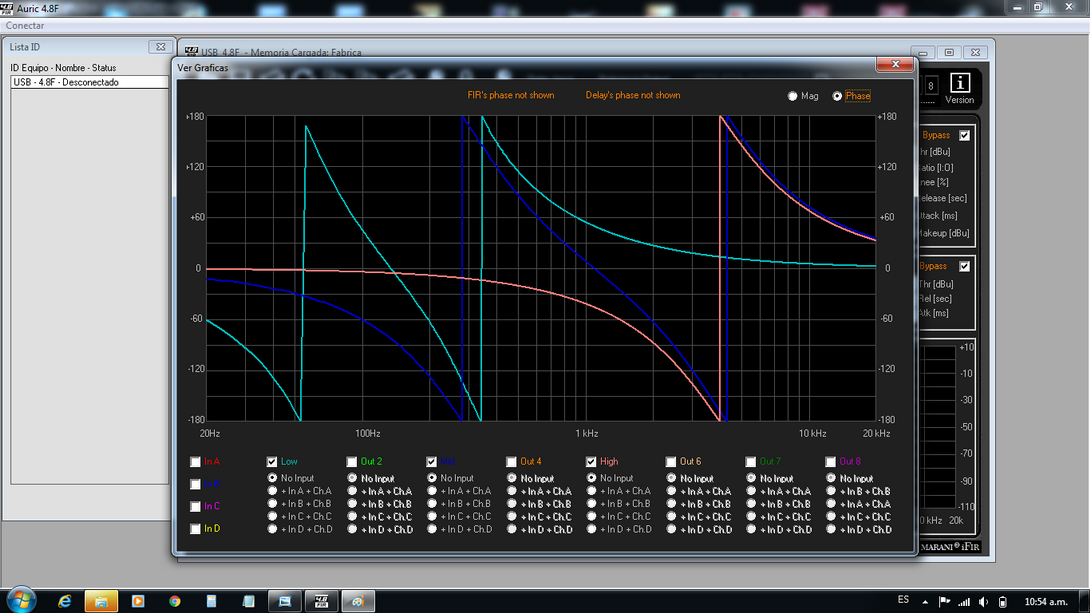
Imagen 7
Crossover
Sistema a 3 vías procesado de manera independiente
Gráfico de color verde LF HPF en 60Hz / LPF En 300Hz. Tipo de filtro Butterworth de 4to orden en ambos filtros
Gráfico de color azul MF HPF en 300Hz / LPF En 4,000Hz. Tipo de filtro Butterworth de 4to orden en ambos filtros
Gráfico de color naranja HF HPF en 4,000Hz Tipo de filtro Butterworth de 4to orden
Para cualquiera de los 3 ejemplos mencionados anteriormente, debemos aplicar su respectivo filtrado para seccionar el rango de frecuencias que cada uno de ellos deberá reproducir.
Regresando al filtrado de señales de las frecuencias destinadas a cada componente, se debe tomar en cuenta el tipo de filtro que se va a implementar, por ejemplo si el filtro será de tipo Bessel, Linkwitz Relay o Butterwoth.
En la siguiente galería de imágenes, se muestran los diferentes tipos de filtros IIR con los que cuenta el procesador digital Auric 4.8 FIR, y se observa su respectiva respuesta de magnitud y fase en cada una de las imágenes.
Galería 1. Gráficos de magnitud y fase de los diversos tipos de filtros IIR y su respectivo comportamiento.
Para el caso de las frecuencias de corte o frecuencias de transición, una recomendación es utilizar la misma frecuencia en el punto de transición, por ejemplo, si el subwoofer tendrá un rango de 30 a 80Hz, el altavoz empleado para la siguiente vía tendrá que comenzar a reproducir desde la misma frecuencia de corte de la vía anterior, en este caso 80Hz, en donde el altavoz anterior dejará de reproducir. En la siguiente transición, el altavoz de frecuencias medias comenzará a reproducir desde los 300Hz hasta la siguiente frecuencia de corte.
De la misma manera es recomendable, salvo algunas ocasiones, que se utilice el mismo tipo de filtro, por ejemplo si en el filtro Low Pass (filtro pasa bajos) se corta en 80Hz con un filtro de tipo Butterworth, se recomienda emplear el mismo tipo de filtro High Pass (filtro pasa alto) en la misma frecuencia de corte. Siempre debemos tener a la mano el uso de herramientas como Delay electrónico y poder invertir la polaridad del altavoz para corregir las diferencias de tiempo de los distintos componentes. De la misma manera el uso de filtros como el All Pass Filter (APF) nos permitirán poner en tiempo y fase nuestras diversas vías de manera más eficaz.
En el siguiente gráfico se muestra el procedimiento de las frecuencias de transición.
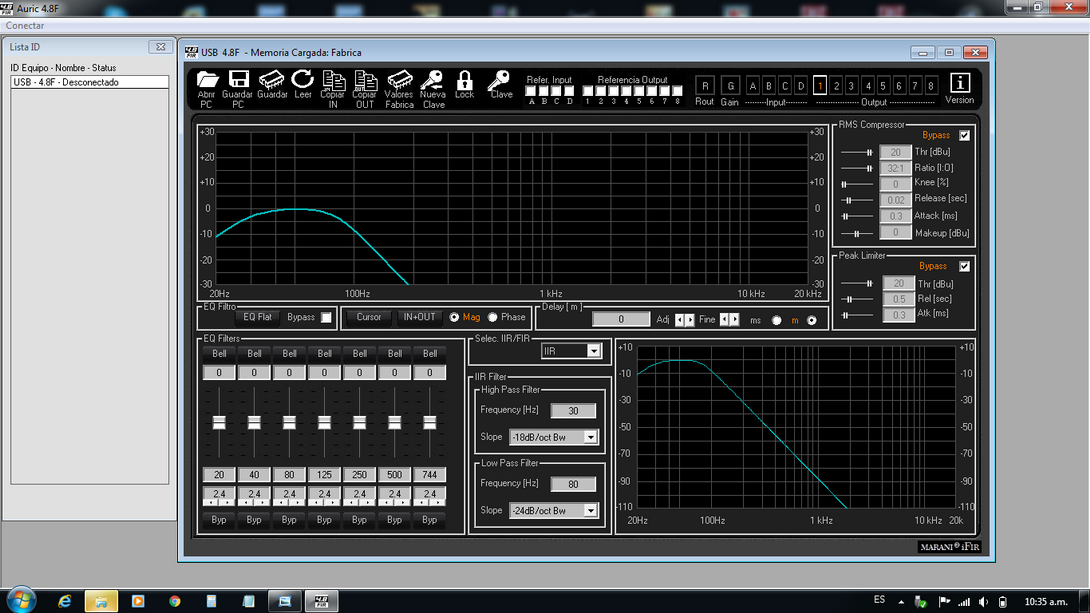
Imagen 8.
Crossover vía de baja frecuencia (Subwoofer)
Procesamiento:
HPF en 30Hz, tipo de filtro Butterworth de 3er orden
LPF en 80Hz, tipo de filtro Butterworth de 4to orden
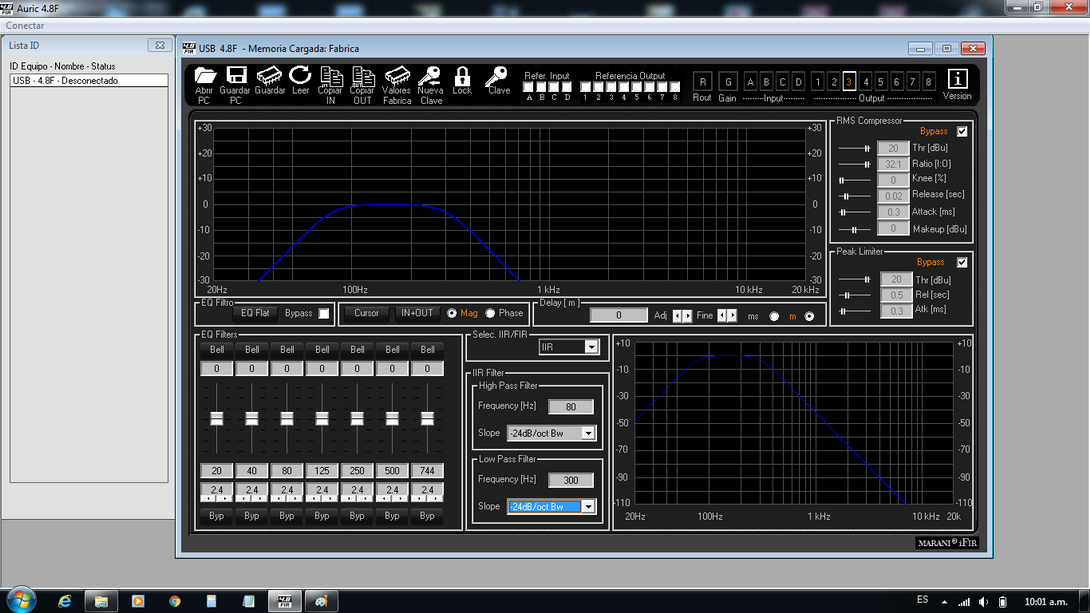
Imagen 9.
Crossover vía de medios graves (LMF)
Procesamiento:
HPF en 80Hz, tipo de filtro Butterworth de 4to orden
LPF en 300Hz, tipo de filtro Butterworth de 4to orden
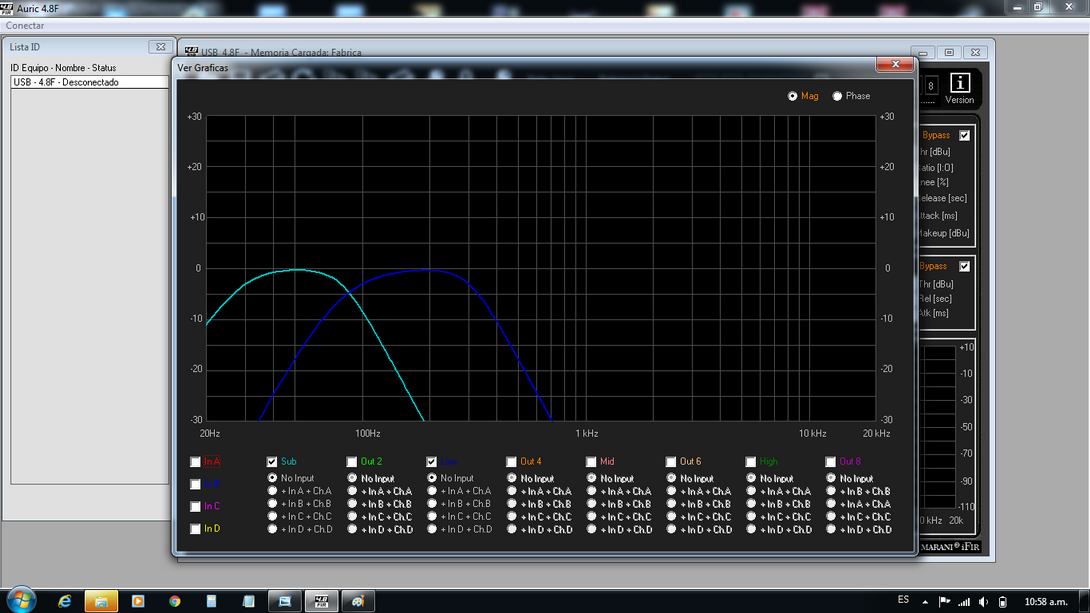
Imagen 10.
Crossover, respuesta del sistema Sub & Low etapa de procesamiento digital
Gráfico de color verde: vía de Subwoofer
Gráfico de color azul: vía de LF
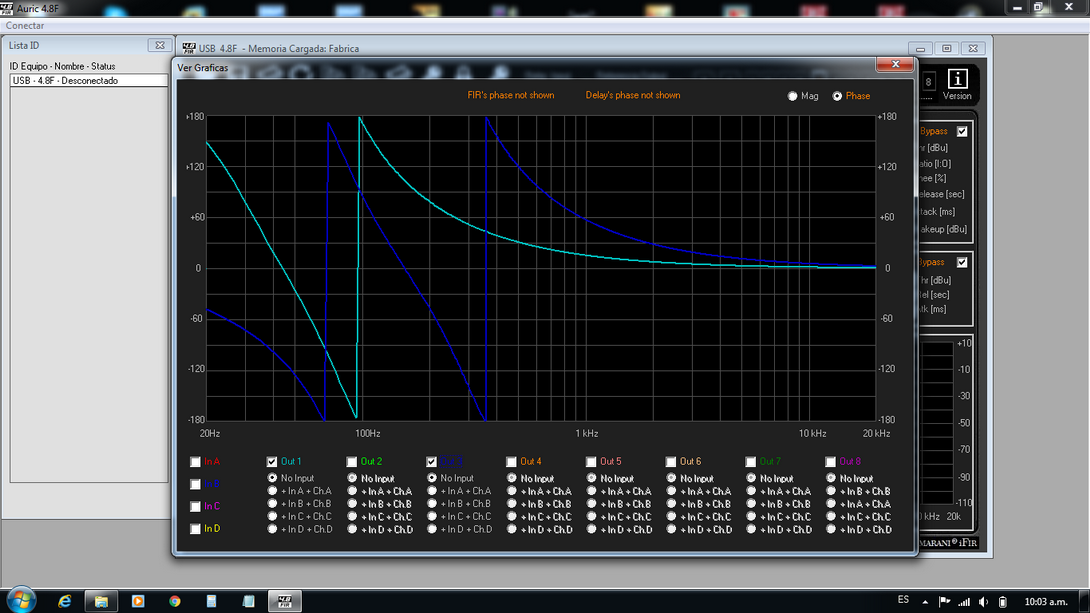
Imagen 11.
Crossover, respuesta de fase del sistema Sub & Low etapa de procesamiento digital
Gráfico de color verde: vía de Subwoofer
Gráfico de color azul: vía de LF
Podemos ver que en cualquiera de los casos anteriores, la fase se modifica de manera dramática, lo que se conoce como distorsión de fase. Todo esto ocurre previo a la etapa acústica, es decir, antes de que el sonido se someta a los cambios ocurridos por los componentes (altavoz, difusor, guía de onda, corrector de fase, etc).
Según la Real Academia Española se conoce como distorsión a la deformación de un sonido, una imagen, una señal, etc., producida durante su transmisión o reproducción.
En este caso podemos denominar como distorsión de fase al fenómeno que ocurre cuando existe un retraso en tiempo desigual de la señal, en ciertas frecuencias de todo su espectro.
Esto tiene que ver con la capacidad del altavoz para reproducir todas las frecuencias al mismo tiempo, y se ve alterado por la propia capacidad mecánica del altavoz, artilugios empleados (guías de onda, difusores, correctores de fase) así como por el uso de los filtros aplicados.
Dentro de este apartado podemos mencionar que existe la posibilidad de obtener una señal con niveles muy bajos de distorsión de fase, o como se conoce comúnmente como una respuesta de fase plana, cuando se emplean filtros cuyo comportamiento permite que se obtenga una respuesta con la mínima distorsión de fase posible, sin embargo esto costaría niveles de latencia muy elevados.
Con el uso de filtros digitales FIR, se puede lograr que los sonidos que sean reproducidos por el sistema por diversos componentes presenten el mismo tiempo en un gran rango de frecuencias.
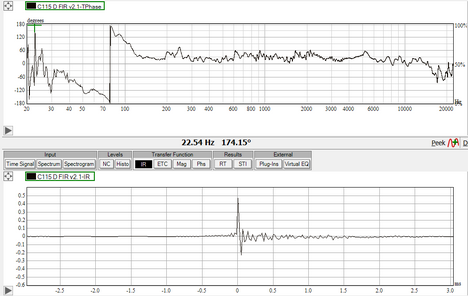
En la siguiente gráfica se muestra la respuesta de magnitud y fase del sistema mencionado al principio de este documento, modelo C-115D de Elipsis, el cual fue procesado con filtros FIR y podemos ver el comportamiento en la respuesta de fase. El cual de derecha a izquierda se observa como desde 18,000 Hz hasta 125Hz aproximadamente se mantiene recta sobre la línea de cero grados, lo que implica que siempre y cuando se mantenga de manera paralela a esta línea, los sonidos tendrán el mismo tiempo de arribo.
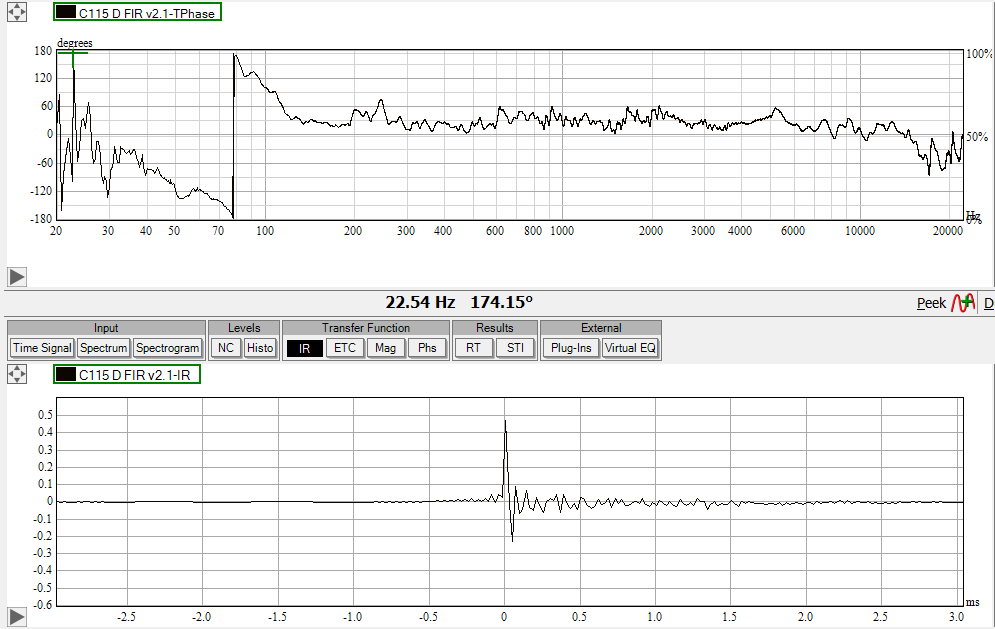
Imagen 12.
Respuesta de magnitud y fase del
sistema C-115D Flex SIN
el procesamiento FIR aplicado medido
a 2 metros del sistema en condiciones Half space.

Imagen 13.
En
la siguiente imagen se muestra la diferencia de la respuesta de fase y magnitud
del mismo sistema C-115D con su proceso FIR y sin el mismo.
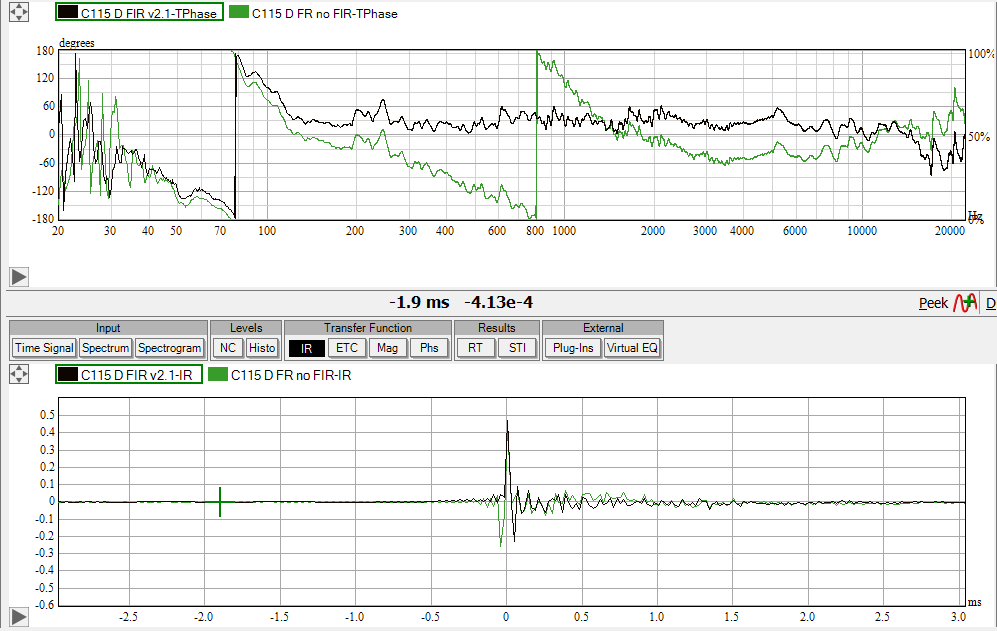
Imagen 14.
En la siguiente imagen se muestra la diferencia de la respuesta de fase y magnitud del mismo sistema C-115D con su proceso FIR y sin el mismo.
Gráfica de color magenta: procesado con filtros IIR
Gráfica de color verde: procesado con filtros FIR
Se aprecia como la distorsión de fase ocurre cuando el sistema es procesado mediante filtros IIR, mientras que al ser procesado con filtros FIR la respuesta de fase muestra un comportamiento uniforme y más estable entre el rango de frecuencias de 125Hz a 18kHz. Lo cual indica que los sonidos entre este rango de frecuencias mencionado, presentan el mismo tiempo de arribo.
Filtros FIR
Los filtros FIR por sus siglas en inglés, significa filtros de Respuesta al Impulso Finita, lo que de cierta manera se contrapone al filtro IIR, que significa por sus siglas en inglés filtros de Respuesta Infinita. Este tipo de filtros son empleados cuando se busque tener la menor distorsión de fase posible, tomando en cuenta que esto conlleva a que múltiples algoritmos matemáticos sean llevados a cabo en el procesador digital para obtener esta respuesta de fase y por consiguiente, se obtendrá mayor latencia a causa de esto.
El uso de filtros FIR genera altas cantidades de latencia. En este ejemplo el sistema C-115D presenta una latencia de 2.3ms únicamente por haber aplicado este proceso. Cabe mencionar que la latencia mencionada es relativamente baja, tomando en cuenta el beneficio otorgado.
Esta tecnología ha tomado auge en los últimos años, a pesar de no ser nueva. Sin embargo, la capacidad de estos filtros en la actualidad es de gran calidad, permitiendo resultados sorprendentes como obtener mayor definición en la alta frecuencia y mejor control de la dispersión del sistema sonoro.
Algo importante de mencionar es que el uso de estos filtros permiten mayor atenuación de la señal en el momento del filtrado, por ejemplo, mientras un filtro de 8vo orden de un filtro IIR presenta una atenuación de -48dB en la octava siguiente a la frecuencia de corte, un filtro FIR puede atenuar hasta 120 dB.
La tecnología digital permite la realización de diferente clase de filtros sin tener un ciclo de retroalimentación. Esta clase de filtros digitales utilizan una línea de pasos de delay denominados como “Taps”, en donde diferentes pasos o toques (Taps) son sumados entre sí, y la función de transferencia del filtro depende en los valores de ponderación de cada Tap. Un pulso dentro de la línea de los pasos de delay no circula por siempre, es por ello que de ahí se obtiene el nombre de filtros de respuesta finita.
Es por ello que la respuesta obtenida a la salida del sistema, presenta un mismo retraso grupal en cierto rango de frecuencias (que en nuestro ejemplo real es de 125Hz a 18kHz) el cual podemos denominar como respuesta de fase plana o bien, son distorsión de fase entre éste rango de frecuencias. Cuando nos referimos a mismo retraso grupal, este puede ser mayor o menor dependiendo el rango de frecuencias en la zona de LF que se deseé controlar, el cual a menor frecuencia tendrá mayor latencia.
Por ejemplo, un sistema de sonido cuya respuesta de fase sea “plana” desde los 60Hz a los 20kHz pudiera tener una latencia aproximada a los 8ms.
De tal manera que las membranas de los componentes (diafragma o cono) cuando se aplica un filtro IIR de -48dB por octava, continuarán generando sonidos con frecuencias posteriores al punto de corte, lo que hará por inercia, que el cono o membrana continúe vibrando, reproduciendo sonidos. Mientras que la señal procesada con filtros FIR, por tener atenuaciones de mayor intensidad, permite que la señal a partir del filtro, sea eliminada. Por ende, la membrana o cono, no vibrará.
Dato curioso:Dentro de la Psico-acústica (rama de la Psicofísica que estudia la percepción del sonido en el cerebro) podemos citar algunos aspectos interesantes, como consecuencia de escuchar un sistema procesado con FIR:-Presencia acústica: esta “sensación” describe una cercanía entre el espectador y el altavoz, a pesar de estar a una distancia considerable.- Impacto sonoro: los niveles de presión sonora (SPL) son percibidos con mayor intensidad, como causa de aumento de nivel, a pesar demantener mismos niveles.-Imagen acústica: Este efecto, orígen de la percepción del sonido, permite por ejemplo correlacionar dos fuentes sonoras (en un sistema estéreo) al centro de ellas, como si se percibiera una sola; cabe mencionar que este efecto ocurre justo al centro de éstas, en una equidistancia.
En la siguiente imagen se muestra la comparativa del mismo sistema C-115D antes de aplicar el filtro FIR y después de haberse aplicado.
La principal diferencia puede ser apreciada en la respuesta al impulso.
Imagen 15. Respuesta al ImpulsoEn la imagen 15 la respuesta al Impulso muestra variaciones en el eje vertical y horizontal. Resultado de haber implementando filtros IIREsto significa que el sistema continuó reproduciendo sonidos sobre un cierto tiempo.Imagen 16. Respuesta al ImpulsoEn la imagen 16 se nota un impulso más limpio, con menores variaciones en ambos ejes (horizontal y vertical) efecto de haber implementado filtros FIR.Esto significa que los sonidos generados por el sistema fueron controlados con mas precisión.
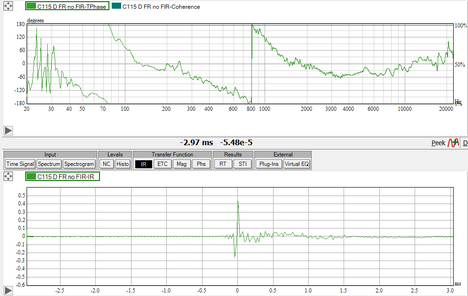
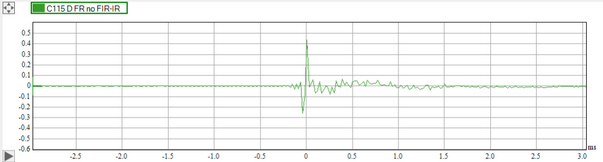
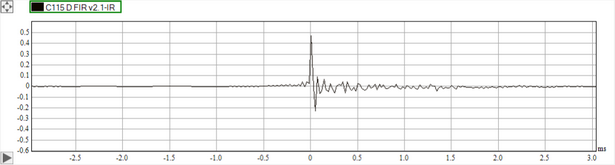
Podemos notar en ambos casos, que cuando un sistema es procesado con filtros FIR no solo la respuesta de fase se mejora, lo que implica que todos los sonidos son reproducidos con el mismo tiempo, es decir, sin distorsión de fase, sino que además, el Impulso es más limpio. Por ende los resultados obtenidos tendrán mayor definición en la alta frecuencia, mayor control de dispersión y los beneficios que son involucrados en la Psico-acústica.
En las siguientes imágenes se muestran los diferentes filtros FIR y sus respectivas pendientes.

Imagen 17.
Comparativa de Crossover.
Filtro de tipo IIR en la frecuencia de 4,000 Hz utilizando un filtro de tipo Butterworth de 8vo orden (-48dB por octava)
Se puede apreciar en la parte superior de la imagen, cómo es afectada la respuesta de fase y en la parte inferior de la misma imagen se aprecia la respuesta de magnitud.
Etapa de procesamiento digital.

Imagen 18.
Comparativa de Crossover.
Filtro de tipo FIR en la frecuencia de 4,000 Hz utilizando un filtro de tipo Blackman-Harris, con 512 números de Taps y atenuación de 108 dB.
Se puede apreciar en la parte superior de la imagen, cómo la respuesta de fase NO es afectada y en la parte inferior de la misma imagen se aprecia la respuesta de magnitud.
Etapa de procesamiento digital.
Se puede notar la gran diferencia entre ambos gráficos, puesto que la atenuación que produce el filtro IIR no es tan severa comparado con el FIR.
De la misma manera se observa la distorsión de fase causada en el filtro IIR.
En ambas imágenes se muestra el procesamiento digital, sin haber sido aplicados en un sistema, es decir, la respuesta de fase no ha sido medida en un altavoz.
Texto por Jorge Araiza
Gerente de Educación y Soporte Técnico